Учебники по популярным профессиям
|
|
|
>>> Перейти на мобильный размер сайта >>> Учебное пособие Матрос морского судна
3.1. Мореходные приборы и инструментыИскусство вождения судна кратчайшим путем от порта к порту называется навигацией. Другими словами, навигация — это способ прокладки курса судна от места отправления до места назначения, контроля курса, а при необходимости и его корректировка. На ходовом мостике находятся приборы и устройства, необходимые для управления судном. Навигационные приборы - компасы, гироазимуты, автопрокладчики, лаги, лоты, эхолоты, секстаны и другие устройства, предназначены для определения местоположения судна и измерения отдельных элементов его движения судна. КомпасыКомпас – основной навигационный прибор, служащий для определения курса судна, для определения направлений (пеленгов) на различные объекты. На судах применяются магнитные и гироскопические компасы. Магнитные компасы используются в качестве резервных и контрольных приборов. По назначению магнитные компасы делятся на главные и путевые. Главный компас устанавливают на верхнем мостике в диаметральной плоскости судна, так чтобы обеспечить хороший обзор по всему горизонту (рис. 3.1). Изображение шкалы картушки при помощи оптической системы проектируется на зеркальный отражатель, установленный перед рулевым (рис. 3.2).
Рис. 3.1. Главный магнитный компас Путевой магнитный компас устанавливают в рулевой рубке. Если главный компас имеет телескопическую передачу отсчета к посту рулевого, то путевой компас не устанавливают.
Рис. 3.2. Зеркальный отражатель магнитного компаса На магнитную стрелку на судне действует судовое магнитное поле. Оно представляет собой совокупность двух магнитных полей: поля Земли и поля судового железа. Этим объясняется, что ось магнитной стрелки располагается не по магнитному меридиану, а в плоскости компасного меридиана. Угол между плоскостями магнитного и компасного меридианов называется девиацией. В комплект компаса входят: котелок с картушкой, нактоуз, девиационный прибор, оптическая система и пеленгатор. На спасательных шлюпках используется легкий, небольшой по размерам компас, не закрепленный стационарно (рис. 3.3).
Рис. 3.3. Шлюпочный магнитный компас Гирокомпас — механический указатель направления истинного (географического) меридиана, предназначенный для определения курса объекта, а также азимута (пеленга) ориентируемого направления (рис. 3.4 - 3.5). Принцип действия гирокомпаса основан на использовании свойств гироскопа и суточного вращения Земли.
Рис. 3.4. Современный гирокомпас Гирокомпасы имеют два преимущества перед магнитными компасами:
Простейший гирокомпас состоит из гироскопа, подвешенного внутри полого шара, который плавает в жидкости; вес шара с гироскопом таков, что его центр тяжести располагается на оси шара в его нижней части, когда ось вращения гироскопа горизонтальна.
Рис. 3.5. Репитер гирокомпаса с пеленгатором, установленный на пелорусе Гирокомпас может выдавать ошибки измерения. Например, резкое изменение курса или скорости вызывают девиацию, и она будет существовать до тех пор, пока гироскоп не отработает такое изменение. На большинстве современных судов имеются системы спутниковой навигации (типа GPS) и/или другие навигационные средства, которые передают во встроенный компьютер гирокомпаса поправки. Современные конструкции лазерных гироскопов не выдают таких ошибок, поскольку вместо механических элементов в них используется принцип разности оптического пути. Электронный компас построен на принципе определения координат через спутниковые системы навигации (рис. 3.6). Принцип действия компаса:
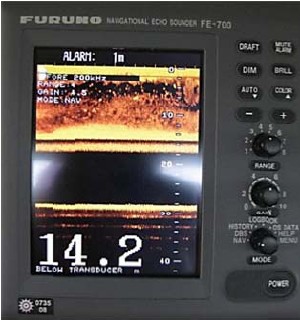
Рис. 3.6. Электронные компасы ЭхолотНавигационный эхолот предназначен для надежного измерения, наглядного представления, регистрации и передачи в другие системы данных о глубине под килем судна (рис. 3.7). Эхолот должен функционировать на всех скоростях судна от 0 до 30 узлов, в условиях сильной аэрации воды, ледяной и снежной шуги, колотого и битого льда, в районах с резко меняющимся рельефом дна, скалистым, песчаным или илистым грунтом.
Рис. 3.7. Указатель эхолота На судах устанавливаются гидроакустические эхолоты. Принцип их работы заключается в следующем: механические колебания, возбуждаемые в вибраторе-излучателе, распространяются в виде короткого ультразвукового импульса, доходят до дна и, отразившись от него, принимаются вибратором-приемником. Эхолоты автоматически указывают глубину моря, которую определяют по скорости распространения звука в воде и промежутку времени от момента посылки импульса до момента его приема (рис. 3.8).
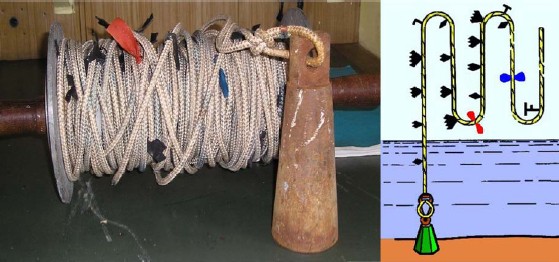
Рис. 3.8. Принцип работы эхолота Эхолот должен обеспечивать измерение глубин под килем в диапазоне от 1 до 200 метров. Указатель глубин должен быть установлен в рулевой рубке, а самописец – в рулевой или штурманской рубке. Для измерения глубин применяется также ручной лот в случаях посадки судна на мель, промера глубин у борта во время стоянки у причала и т.п. Ручной лот (рис. 3.9) состоит из свинцовой или чугунной гири и лотлиня. Гиря выполняется в форме конуса высотой 25 - 30 см и весом от 3 до 5 кг. В нижнем широком основании гири делается выемка, которая перед замером глубины смазывается солидолом. При касании лотом морского дна частицы грунта прилипают к солидолу, и после подъема лота по ним можно судить о характере грунта.
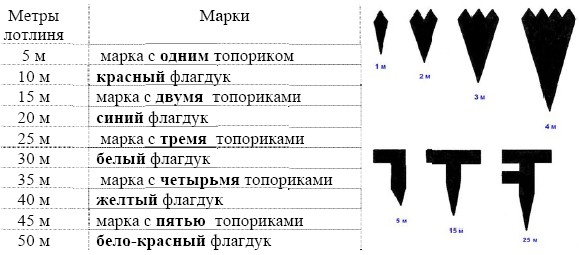
Рис. 3.9. Ручной лот Разбивка лотлиня производится в метрических единицах и обозначается по следующей системе: на десятках метров вплетаются флагдуки различных цветов; каждое количество метров, оканчивающееся цифрой 5, обозначаются кожаной маркой с топориками.
В каждой пятерке первый метр обозначается кожаной маркой с одним зубцом, второй - маркой с двумя зубцами, третий - с тремя зубцами и четвертый - с четырьмя. ЛагПримерно с конца XV в. получил известность простой измеритель скорости - ручной лаг. Он состоял из деревянной дощечки со свинцовым грузом формой в 1/1 круга, к которой прикреплялся легкий трос, имеющий узлы через равные промежутки (чаще всего 7 м). Для измерения скорости парусных судов, плававших в те времена, лаг, как приблизительно постоянная отметка на поверхности воды, бросали за борт и поворачивали песочные часы, отмеряющие определенную продолжительность времени (14 с). За время, пока сыпался песок, матрос считал количество узлов, которые проходили через его руки. Число узлов, полученных за это время, давало в пересчете скорость судна в морских милях в час. Этот способ измерения скорости объясняет возникновение выражения «узел». Лаг - навигационный прибор для измерения скорости судна и пройденного им расстояния. На морских судах применяются механические, геомагнитные, гидроакустические, индукционные и радиодоплеровские лаги. Различают:
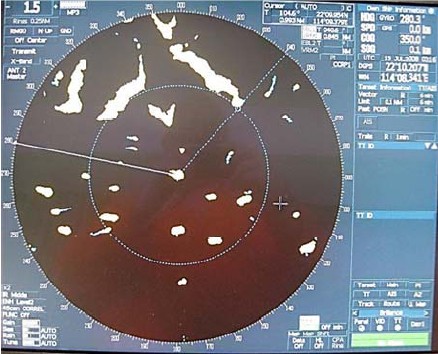
Гидродинамический лаг - относительный лаг, действие которого основано на измерении разности давления, которая зависит от скорости судна. Основу гидродинамического лага составляют две трубки, выведенные под днище судна: выходное отверстие одной трубки направлено к носовой части судна; а выходное отверстие другой трубки находится заподлицо с обшивкой. Динамическое давление определяется по разности высот воды в трубках и преобразуется механизмами лага в показания скорости судна в узлах. Кроме скорости, гидродинамические лаги показывают пройденное судном расстояние в милях. Индукционный лаг - относительный лаг, принцип действия которого основан на зависимости между относительной скоростью проводника в магнитном поле и наводимой в этом проводнике электродвижущей силой (ЭДС). Магнитное поле создается электромагнитом лага, а проводником является морская вода. Когда судно движется, магнитное поле пересекает неподвижные участки водной среды, при этом в воде индуцируется ЭДС, пропорциональная скорости перемещения судна. С электродов ЭДС поступает в специальное устройство, которое вычисляет скорость судна и пройденное расстояние. Гидроакустический лаг - абсолютный лаг, работающий на принципе эхолота. Различают доплеровские и корреляционные гидроакустические лаги. Геомагнитный лаг - абсолютный лаг, основанный на использовании свойств магнитного поля Земли. Радиолаг - лаг, принцип действия которого основан на использовании законов распространения радиоволн. На практике отсчеты лага замечают в начале каждого часа и по разности отсчетов получают плавание S в милях и скорость судна V в узлах. Лаги имеют погрешность, которая учитывается поправкой лага. Радионавигационные приборыСудовая радиолокационная станция (РЛС) предназначена для обнаружения надводных объектов и берега, определения места судна, обеспечения плавания в узкостях, предупреждения столкновения судов (рис. 3.10).
Рис. 3.10. Экран РЛС В РЛС используется явление отражения радиоволн от различных объектов, расположенных на пути их распространения, таким образом, в радиолокации используется явление эха. РЛС содержит передатчик, приемник, антенно-волноводное устройство, индикатор с экраном для визуального наблюдения эхо-сигналов. Принцип работы РЛС следующий. Передатчик станции вырабатывает мощные высокочастотные импульсы электромагнитной энергии, которые с помощью антенны посылаются в пространство узким лучом. Отраженные от какого-либо объекта (судна, высокого берега и т. п.) радиоимпульсы возвращаются в виде эхо-сигналов к антенне и поступают в приемник. По направлению узкого радиолокационного луча, который в данный момент отразился от объекта, можно определить пеленг или курсовой угол объекта. Измерив, промежуток времени между посылкой импульса и приемом отраженного сигнала, можно получить расстояние до объекта. Так как при работе РЛС антенна вращается, излучаемые импульсные колебания охватывают весь горизонт. Поэтому на экране индикатора судовой РЛС создается изображение окружающей судно обстановки. Центральная светящаяся точка на экране индикатора РЛС отмечает место судна, а идущая от этой точки светящаяся линия показывает курс судна. Изображение различных объектов на экране радара может быть ориентировано относительно диаметральной плоскости судна (стабилизация по курсу) или относительно истинного меридиана (стабилизация по норду). Дальность «видимости» РЛС достигает несколько десятков миль и зависит от отражательной способности объектов и гидрометеорологических факторов. Судовые РЛС позволяют за короткий промежуток времени определить курс и скорость встречного судна и избежать, таким образом, столкновения.
Рис. 3.11. Экран САРП Все суда должны обеспечивать радиолокационную прокладку на экране РЛС, для этого их оборудуют системой автоматической радиолокационной прокладки (САРП). САРП выполняет обработку радиолокационной информации и позволяет производить (рис. 3.11):
Автоматическая информационная система (АИС) является морской навигационной системой, использующей взаимный обмен между судами, а также между судном и береговой службой для передачи информации о позывном и наименовании судна для его опознавания, координатах, сведений о судне (размеры, груз, осадка и др.) и его рейсе, параметрах движения (курс, скорость и др.) с целью решения задач по предупреждению столкновений судов, контроля за соблюдением режима плавания и мониторинга судов в море. Электронные картографические навигационные информационные системы (ЭКНИС) являются эффективным средством навигации, существенно сокращающим нагрузку на вахтенного помощника и позволяющим уделять максимум времени наблюдению за окружающей обстановкой и выработке обоснованных решений по управлению судном (рис. 3.12).
Рис. 3.12. ЭКНИС Основные возможности и свойства ЭКНИС:
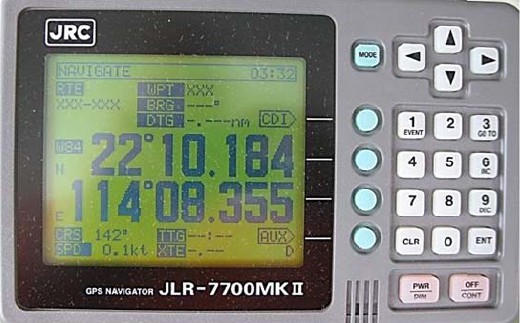
Спутниковая система навигации - это система, состоящая из наземного и космического оборудования, предназначенная для определения местоположения (географических координат), а также параметров движения (скорости и направления движения и т. д.) для наземных, водных и воздушных объектов (рис. 3.13).
Рис. 3.13. Индикатор GPS GPS - это глобальная навигационная спутниковая система определения местоположения Global Position System. Система включает группировку низкоорбитальных навигационных спутников, наземные средства слежения и управления и самые разнообразные, служащие для определения координат. Принцип определения своего места на земной поверхности в глобальной системе позиционирования заключается в одновременном измерении расстояния до нескольких навигационных спутников (не менее трёх) - с известными параметрами их орбит на каждый момент времени, и вычислении по изменённым расстояниям своих координат. Навигационные инструментыНавигационный секстан - угломерный инструмент (рис. 3.14), служащий:
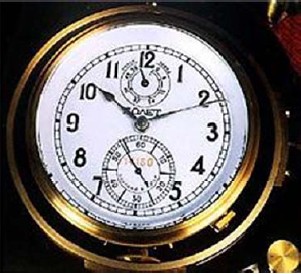
Рис. 3.14. Секстан Слово «секстан» происходит от латинского слова «Sextans» - шестая часть круга. Морской хронометр - высокоточные переносные часы, позволяющие получать в любой момент достаточно точное гринвичское время (рис. 3.15).
Рис. 3.15. Хронометр Судовое время определяется по меридиану местонахождения судна и чаще всего корректируется ночью вахтенным офицером. Так, например, при изменении долготы на 15° на восток часы переводятся на 1 час вперед, а при изменении долготы на 15° в западном направлении - на 1 час назад. Для того чтобы в машинном отделении, столовой команды, каютах, салонах, барах, камбузе иметь точное и одинаковое показание времени, устанавливают электрические часы, корректируемые от главных часов, находящихся на мостике.
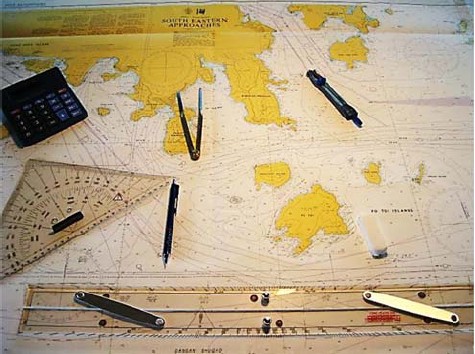
Рис. 3.16. Прокладочный инструмент К прокладочным инструментам относятся (рис. 3.16):
Кроме этого, на мостике находятся журналы, папки с документацией, навигационные карты, обязательные справочники и пособия и др. (рис. 3.17).
Рис. 3.17. Документация
|












|
|